#include <IcpVariable.h>
Definition at line 35 of file IcpVariable.h.
◆ IcpVariable() [1/2]
| smtrat::icp::IcpVariable::IcpVariable |
( |
| ) |
|
|
private |
◆ IcpVariable() [2/2]
| smtrat::icp::IcpVariable::IcpVariable |
( |
carl::Variable::Arg |
_var, |
|
|
bool |
_original, |
|
|
ModuleInput::iterator |
_defaultPosition, |
|
|
EvalDoubleIntervalMap::iterator |
_intervalPos, |
|
|
const LRAVariable * |
_lraVar = NULL |
|
) |
| |
|
inline |
◆ ~IcpVariable()
| smtrat::icp::IcpVariable::~IcpVariable |
( |
| ) |
|
|
inline |
◆ addCandidate()
◆ addCandidates()
◆ addOriginalConstraint()
| void smtrat::icp::IcpVariable::addOriginalConstraint |
( |
const FormulaT & |
_constraint | ) |
|
|
inline |
◆ candidates()
◆ decrementActivity()
| void smtrat::icp::IcpVariable::decrementActivity |
( |
| ) |
|
|
inline |
◆ externalLeftBound()
◆ externalRightBound()
◆ incrementActivity()
| void smtrat::icp::IcpVariable::incrementActivity |
( |
| ) |
|
|
inline |
◆ internalLeftBound()
◆ internalRightBound()
◆ interval()
◆ intervalPosition()
| EvalDoubleIntervalMap::const_iterator smtrat::icp::IcpVariable::intervalPosition |
( |
| ) |
const |
|
inline |
◆ is_linear()
| bool smtrat::icp::IcpVariable::is_linear |
( |
| ) |
|
|
inline |
◆ isActive()
| bool smtrat::icp::IcpVariable::isActive |
( |
| ) |
const |
|
inline |
◆ isExternalUpdated()
| Updated smtrat::icp::IcpVariable::isExternalUpdated |
( |
| ) |
const |
|
inline |
◆ isInternalBoundsSet()
| Updated smtrat::icp::IcpVariable::isInternalBoundsSet |
( |
| ) |
const |
|
inline |
◆ isInternalUpdated()
| Updated smtrat::icp::IcpVariable::isInternalUpdated |
( |
| ) |
const |
|
inline |
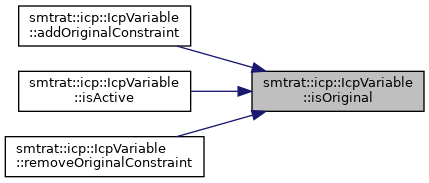
◆ isOriginal()
| bool smtrat::icp::IcpVariable::isOriginal |
( |
| ) |
const |
|
inline |
◆ lraVar()
| const LRAVariable* smtrat::icp::IcpVariable::lraVar |
( |
| ) |
const |
|
inline |
◆ operator<()
| bool smtrat::icp::IcpVariable::operator< |
( |
IcpVariable const & |
rhs | ) |
const |
|
inline |
◆ print()
| void smtrat::icp::IcpVariable::print |
( |
std::ostream & |
_out = std::cout, |
|
|
bool |
_withContractionCandidates = false |
|
) |
| const |
|
inline |
◆ removeOriginalConstraint()
| void smtrat::icp::IcpVariable::removeOriginalConstraint |
( |
const FormulaT & |
_constraint | ) |
|
|
inline |
◆ setExternalLeftBound()
◆ setExternalModified()
| void smtrat::icp::IcpVariable::setExternalModified |
( |
| ) |
|
|
inline |
◆ setExternalRightBound()
◆ setExternalUnmodified()
| void smtrat::icp::IcpVariable::setExternalUnmodified |
( |
| ) |
|
|
inline |
◆ setInternalLeftBound()
| void smtrat::icp::IcpVariable::setInternalLeftBound |
( |
const smtrat::FormulaT & |
_left | ) |
|
|
inline |
◆ setInternalRightBound()
| void smtrat::icp::IcpVariable::setInternalRightBound |
( |
const smtrat::FormulaT & |
_right | ) |
|
|
inline |
◆ setInternalUnmodified()
| void smtrat::icp::IcpVariable::setInternalUnmodified |
( |
| ) |
|
|
inline |
◆ setInterval()
| void smtrat::icp::IcpVariable::setInterval |
( |
const DoubleInterval & |
_interval | ) |
|
|
inline |
◆ setLraVar()
| void smtrat::icp::IcpVariable::setLraVar |
( |
const LRAVariable * |
_lraVar | ) |
|
|
inline |
◆ setUnmodified()
| void smtrat::icp::IcpVariable::setUnmodified |
( |
| ) |
|
|
inline |
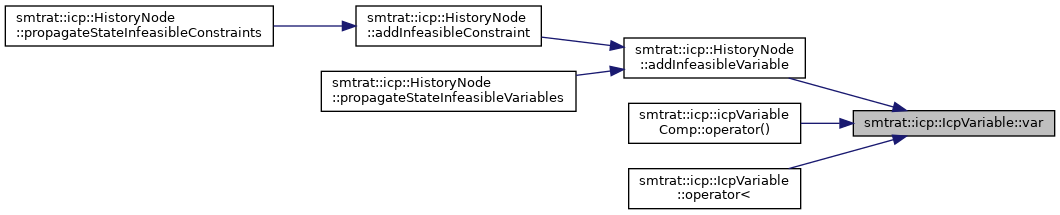
◆ var()
| carl::Variable::Arg smtrat::icp::IcpVariable::var |
( |
| ) |
const |
|
inline |
◆ operator<<
| std::ostream& operator<< |
( |
std::ostream & |
os, |
|
|
const IcpVariable & |
_var |
|
) |
| |
|
friend |
◆ mActivity
| unsigned smtrat::icp::IcpVariable::mActivity |
|
private |
◆ mBoundsSet
◆ mCandidates
◆ mDefaultPosition
◆ mExternalLeftBound
◆ mExternalRightBound
◆ mInternalLeftBound
◆ mInternalRightBound
◆ mIntervalPos
| EvalDoubleIntervalMap::iterator smtrat::icp::IcpVariable::mIntervalPos |
|
private |
◆ mLinear
| bool smtrat::icp::IcpVariable::mLinear |
|
private |
◆ mLraVar
◆ mOriginal
| bool smtrat::icp::IcpVariable::mOriginal |
|
private |
◆ mOriginalConstraints
| FormulaSetT smtrat::icp::IcpVariable::mOriginalConstraints |
|
private |
◆ mUpdated
◆ mVar
| carl::Variable smtrat::icp::IcpVariable::mVar |
|
private |
The documentation for this class was generated from the following file: