|
SMT-RAT
24.02
Toolbox for Strategic and Parallel Satisfiability-Modulo-Theories Solving
|
|
SMT-RAT
24.02
Toolbox for Strategic and Parallel Satisfiability-Modulo-Theories Solving
|
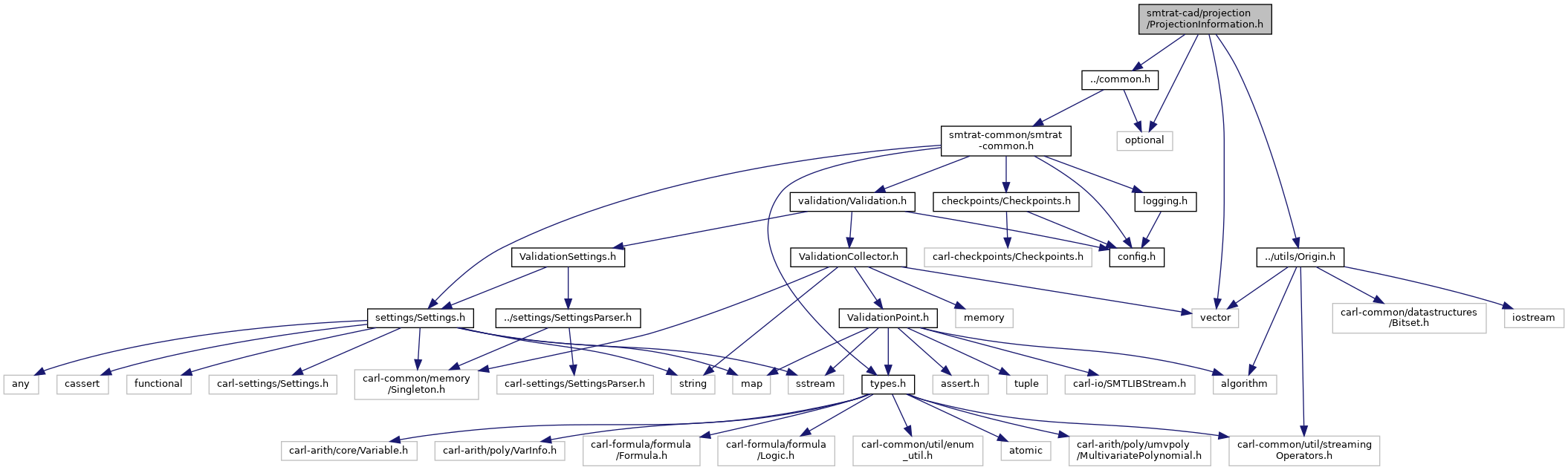

Go to the source code of this file.
Namespaces | |
| smtrat | |
| Class to create the formulas for axioms. | |
| smtrat::cad | |
Functions | |
| std::ostream & | smtrat::cad::operator<< (std::ostream &os, const ProjectionGlobalInformation &gi) |
| std::ostream & | smtrat::cad::operator<< (std::ostream &os, const ProjectionLevelInformation::LevelInfo &li) |
| std::ostream & | smtrat::cad::operator<< (std::ostream &os, const ProjectionPolynomialInformation::PolyInfo &pi) |