|
SMT-RAT
24.02
Toolbox for Strategic and Parallel Satisfiability-Modulo-Theories Solving
|
|
SMT-RAT
24.02
Toolbox for Strategic and Parallel Satisfiability-Modulo-Theories Solving
|
#include <iostream>#include <map>#include <vector>#include <optional>#include <smtrat-cad/common.h>#include <smtrat-cad/projection/BaseProjection.h>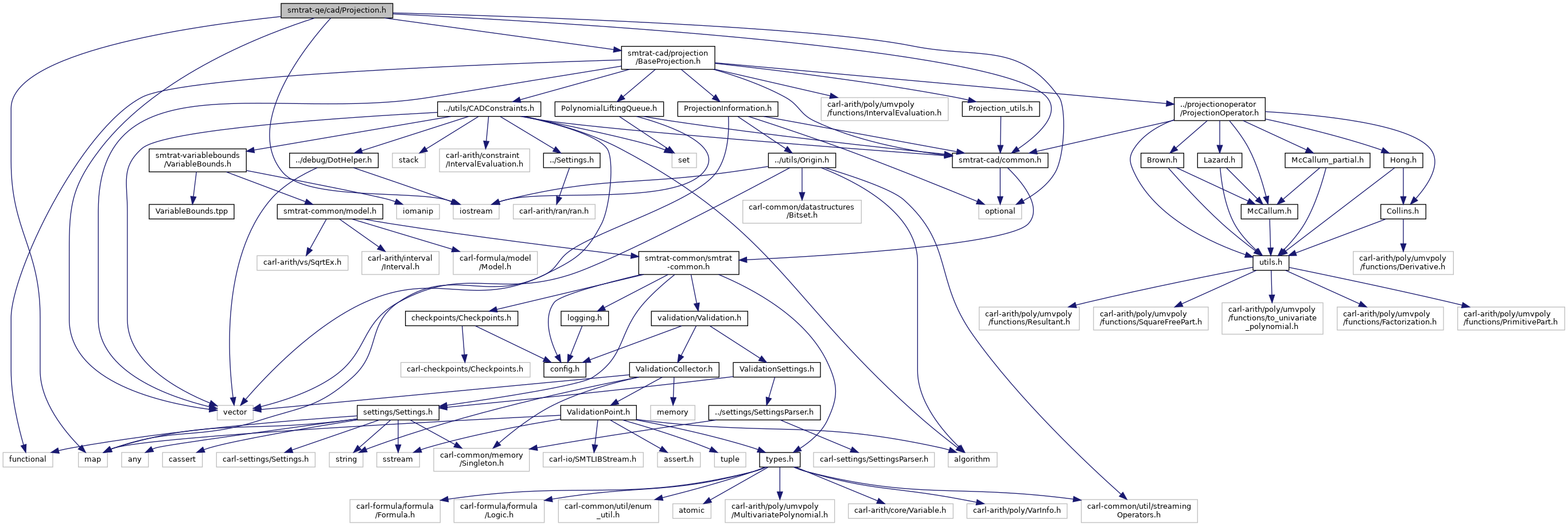
Go to the source code of this file.
Data Structures | |
| class | smtrat::qe::cad::Projection< Settings > |
Namespaces | |
| smtrat | |
| Class to create the formulas for axioms. | |
| smtrat::qe | |
| smtrat::qe::cad | |
Functions | |
| template<typename S > | |
| std::ostream & | smtrat::qe::cad::operator<< (std::ostream &os, const Projection< S > &p) |