|
SMT-RAT
24.02
Toolbox for Strategic and Parallel Satisfiability-Modulo-Theories Solving
|
|
SMT-RAT
24.02
Toolbox for Strategic and Parallel Satisfiability-Modulo-Theories Solving
|
Representation of a bipartite graph (C+S, E) of vertices C and S, representing the constraints and samples, respectively. More...
#include <ConflictGraph.h>
Public Member Functions | |
| ConflictGraph (std::size_t constraints) | |
| std::size_t | coveredSamples (std::size_t id) const |
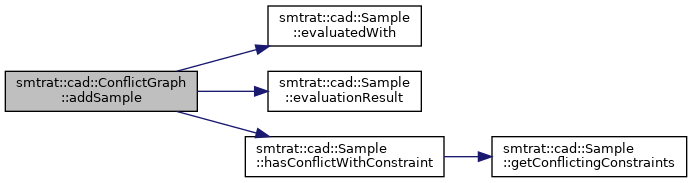
| void | addSample (const Sample &sample) |
| std::size_t | getMaxDegreeConstraint () const |
| Retrieves the constraint that covers the most samples. More... | |
| void | selectConstraint (std::size_t id) |
| Removes the given constraint and disable all sample points covered by this constraint. More... | |
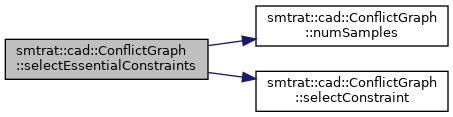
| std::vector< size_t > | selectEssentialConstraints () |
| Selects all essential constraints and returns their indices. More... | |
| ConflictGraph | removeDuplicateColumns () |
| Returns a new ConflictGraph whose adjacency matrix consists only of the unique columns of the adjacency matrix of this graph. More... | |
| bool | hasRemainingSamples () const |
| Checks if there are samples still uncovered. More... | |
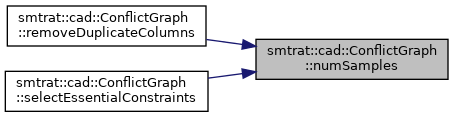
| std::size_t | numSamples () const |
| std::size_t | numRemainingConstraints () const |
| carl::Bitset | getData (std::size_t id) |
| std::vector< std::pair< std::size_t, carl::Bitset > > | getRemainingConstraints () |
Private Attributes | |
| std::vector< carl::Bitset > | mData |
| Stores for each constraints, which sample points violate the constraint. More... | |
| std::size_t | mNextSID = 0 |
Friends | |
| std::ostream & | operator<< (std::ostream &os, const ConflictGraph &cg) |
Representation of a bipartite graph (C+S, E) of vertices C and S, representing the constraints and samples, respectively.
A vertex from C and a vertex from S are connected by an edge in E iff the corresponding constraint conflicts with the corresponding sample point.
Definition at line 23 of file ConflictGraph.h.
|
inline |
Definition at line 31 of file ConflictGraph.h.
| void smtrat::cad::ConflictGraph::addSample | ( | const Sample & | sample | ) |
Definition at line 7 of file ConflictGraph.cpp.

|
inline |
| carl::Bitset smtrat::cad::ConflictGraph::getData | ( | std::size_t | id | ) |
Definition at line 112 of file ConflictGraph.cpp.
| std::size_t smtrat::cad::ConflictGraph::getMaxDegreeConstraint | ( | ) | const |
Retrieves the constraint that covers the most samples.
Definition at line 18 of file ConflictGraph.cpp.
| std::vector< std::pair< std::size_t, carl::Bitset > > smtrat::cad::ConflictGraph::getRemainingConstraints | ( | ) |
Definition at line 116 of file ConflictGraph.cpp.
| bool smtrat::cad::ConflictGraph::hasRemainingSamples | ( | ) | const |
Checks if there are samples still uncovered.
Definition at line 89 of file ConflictGraph.cpp.
| std::size_t smtrat::cad::ConflictGraph::numRemainingConstraints | ( | ) | const |
Definition at line 104 of file ConflictGraph.cpp.
| std::size_t smtrat::cad::ConflictGraph::numSamples | ( | ) | const |
| ConflictGraph smtrat::cad::ConflictGraph::removeDuplicateColumns | ( | ) |
Returns a new ConflictGraph whose adjacency matrix consists only of the unique columns of the adjacency matrix of this graph.
Definition at line 63 of file ConflictGraph.cpp.

| void smtrat::cad::ConflictGraph::selectConstraint | ( | std::size_t | id | ) |
Removes the given constraint and disable all sample points covered by this constraint.
Definition at line 32 of file ConflictGraph.cpp.

| std::vector< std::size_t > smtrat::cad::ConflictGraph::selectEssentialConstraints | ( | ) |
Selects all essential constraints and returns their indices.
Definition at line 40 of file ConflictGraph.cpp.
|
friend |
Definition at line 133 of file ConflictGraph.cpp.
|
private |
Stores for each constraints, which sample points violate the constraint.
Definition at line 28 of file ConflictGraph.h.
|
private |
Definition at line 29 of file ConflictGraph.h.