|
SMT-RAT
24.02
Toolbox for Strategic and Parallel Satisfiability-Modulo-Theories Solving
|
|
SMT-RAT
24.02
Toolbox for Strategic and Parallel Satisfiability-Modulo-Theories Solving
|
#include <algorithm>#include <list>#include <utility>#include <vector>#include "../common.h"#include "BaseProjection.h"#include "Projection_Model.h"#include "Projection_NO.h"#include "Projection_NU.h"#include "Projection_S.h"#include "Projection_F.h"#include "Projection_EC.h"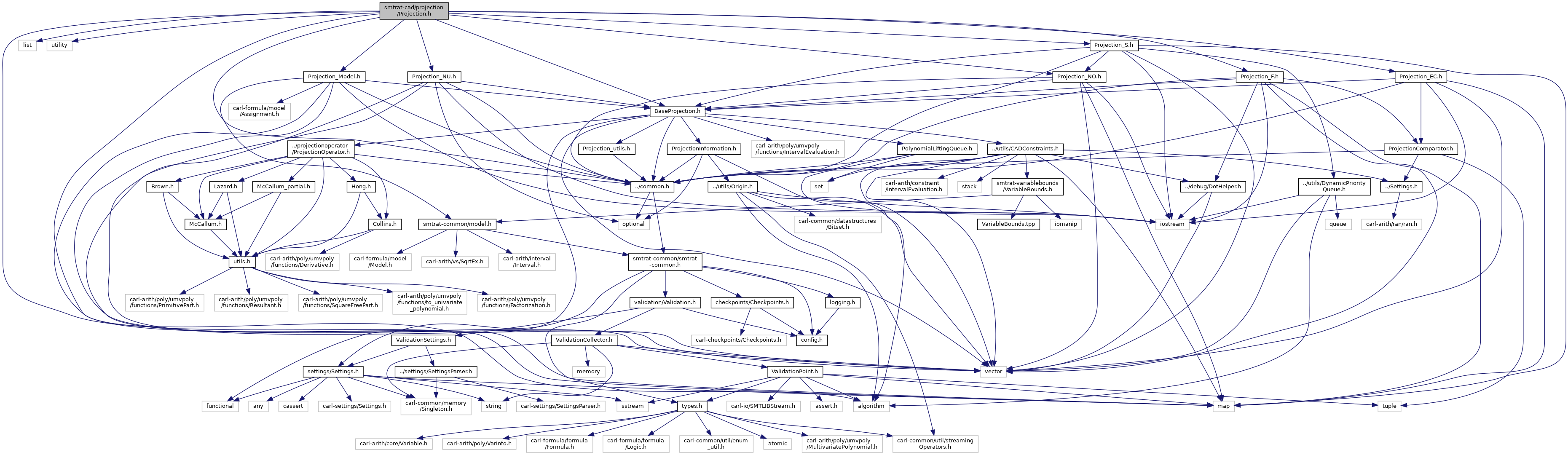

Go to the source code of this file.
Data Structures | |
| class | smtrat::cad::Projection< incrementality, backtracking, Settings > |
| class | smtrat::cad::ModelBasedProjection< incrementality, backtracking, Settings > |
Namespaces | |
| smtrat | |
| Class to create the formulas for axioms. | |
| smtrat::cad | |
Typedefs | |
| template<typename Settings > | |
| using | smtrat::cad::ProjectionT = Projection< Settings::incrementality, Settings::backtracking, Settings > |
| template<typename Settings > | |
| using | smtrat::cad::ModelBasedProjectionT = ModelBasedProjection< Settings::incrementality, Settings::backtracking, Settings > |